一、动捕软件VRPN功能介绍
一 、 XINGYING 的安装
1.在操作系统为 64 位的 Windows 系统上,关闭防火墙退出杀毒软件 (360、电脑管家等),以鼠标右键点击"以管理员身份运行" 的方式,运行 "XINGYING 4.0.0.*** exe",会弹出安装界面。
2.根据提示,选择安装语言后,点击"Next"进行下一步即可安装。部分电脑会需要安装 Windwos 运行库,选择默认安装即可。安装完毕后, 桌面上会出现软件图标。
二、XINGYING 的网络设置
(一)电脑网络设置
在电脑的本地连接进行设置,以Win10 为例,依次点击"控制面板-网络和Internet-网络和共享中心-更改适配器设置-以太网(右键)-属性-双击Internet 协议版本 4-使用下面的 IP 地址",其中 IP 地址设置为 10.1.1.198,子网掩码为 255.255.255.0,其他不需要设置,点击确定(3.1.1)。
(二)开启 VRPN 功能
在 XINGYING 软件视图打开数据广播面板,在"网卡地址"下拉框选择 IP 地址,选择 10.1.1.198。勾选 VRPN 开启,点击播放。
三、在 Window 系统上测试 VRPN 获取数据
(一)启动 VRPN 服务获取数据
1.做好对应的配置设置后,在实时模式下播放,快速创建一个 Markerset, 或者在后处理模式下加载数据,Markerset 的创建方法请参考用户手册。
2.勾 选 了 SDK 功 能 和 VRPN 功 能 后 , 在 Windows 终 端 中 进 入 "NokovVrpnClient.exe"的路径运行"NokovVrpnClient.exe" 来获取数据,成功收到数据后,XINGYING 的 VRPN 数据就成功启动了,若无法收到数据, 请 检 查 XINGYING 中 的 VRPN 配 置 和 IP 地 址 是 否 正 确 。 ("NokovVrpnClient.exe"可执行程序,请咨询技术工程师获取)。
四、VRPN介绍
(一) 类型
VRPN可分为三种类型:刚体、标记点、标记点(未命名)。
- 在勾选VRPN各个功能以及修改值之前,请先将软件暂停播放,在数据广播中取消勾选"启用VRPN" 后再进行功能的勾选和值的修改,在勾选好功能后请勾选上"启用VRPN"并将软件播放。
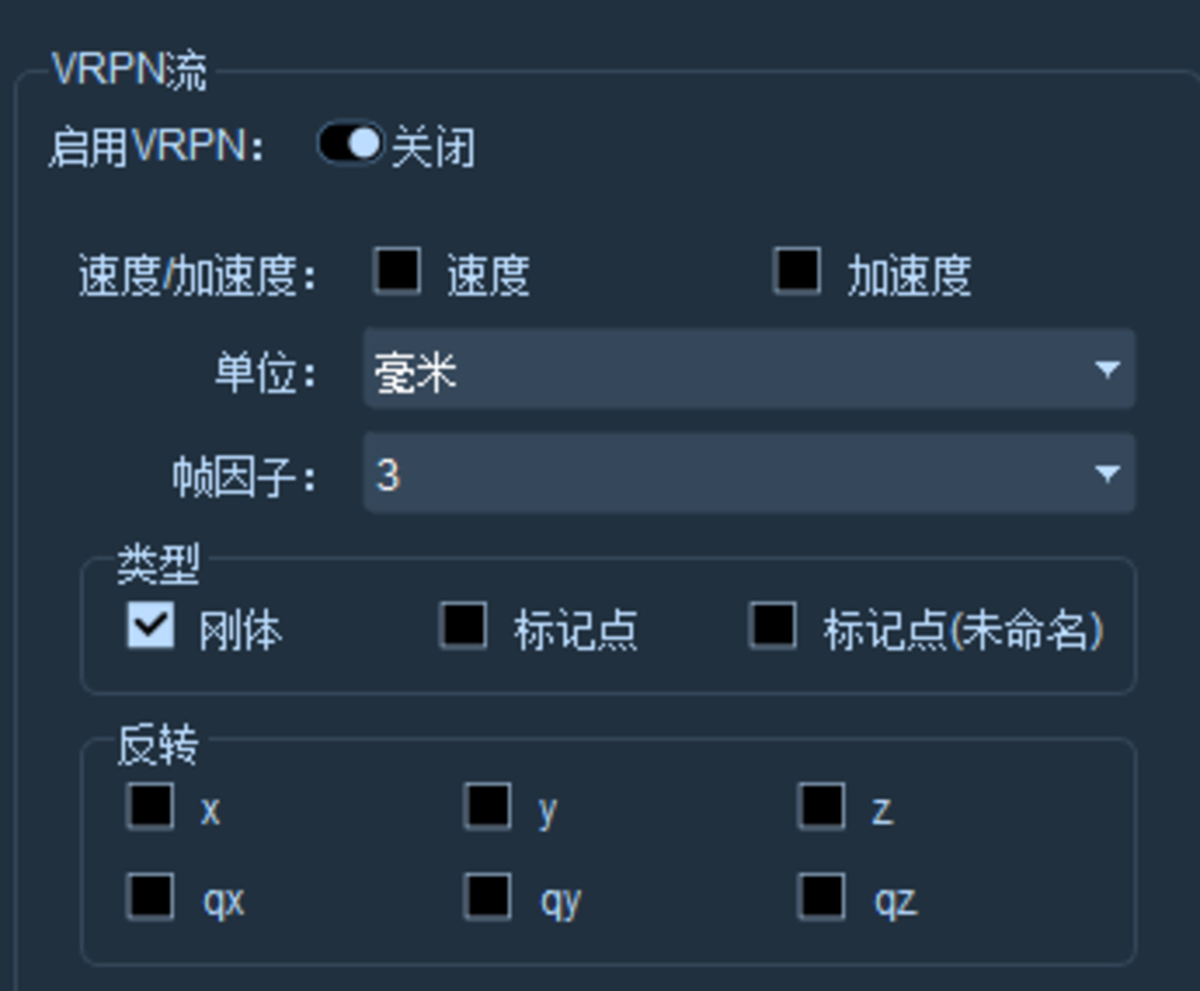
启用VRPN
- 刚体类型:
- 刚体类型表示发出刚体的信息数据。在XINGYING中快速创建一个刚体,选择"刚体"类型,开启VRPN,播放动捕软件。在Ros2的终端输入" ros2 launch vrpn_client_ros sample.launch.py ",获取到动捕数据后,打开另一个终端输入"ros2 topic list" ,可以看到终端中打印出的刚体的话题,输入"ros2 topic echo+话题名称",终端中会打印该话题的数据;
- 标记点类型
- 标记点类型勾选时表示发出有名称的Marker点信息数据。创建Mrakerset后选择"标记点" 类型,开启VRPN,播放动捕软件,在Ros2终端输入命令启动Ros2,获取到动捕数据后打开另一个终端输入命令订阅标记点话题," Tracker0_Marker1"中的"Tracker0"表示Markerset名称,"Marker1" 表示Markerset的第一个点的名称,若需要获取Markerset的第二个点的数据,只需要将"Marker1"更改为"Marker2",以此类推..... .输入命令"ros2 topic echo /Tracker0_Marker1/pose"回车后,可以看到"Tracker0"的"Marker1"这个点的数据了;
.png)
录入坐标
.png)
绘制
- 标记点(未命名)
- 标记点(未命名)表示发出未命名的Marker点信息数据。选择"标记点(未命名)" 类型,开启VRPN,播放动捕软件。在Ros2终端输入命令启动Ros2,获取到动捕数据后打开另一个终端输入命令订阅未命名点话题,输入命令" ros2 topic echo /U_Tracker0/pose"回车后,终端中会打印未命名点的数据。"U_Tracker0" 表示第一个未命名点,若要获取第二个未命名点的信息数据,可以将"U_Tracker0"改为"U_Tracker1",表示第二个未命名点。
.png)
打印轨迹
.png)
绘制轨迹
(二) 速度和加速度
- 在XINGYING软件中勾选"速度"后,在Ros2终端输入命令获取话题,"twist"表示速度,输入命令"rostopic echo /Tracker4/twist" 按下回车,终端中便会打印"Tracker4"这个刚体的的速度的数据信息了;
- 在XINGYING软件中勾选"加速度"后,在Ros2终端输入命令获取话题,"accel"表示加速度,输入命令"rostopic echo /Tracker4/accel" 按下回车,终端中便会打印"Tracker4"这个刚体的加速度的数据信息了;
- Frames表示帧因子,该值用于速度计算,可在下拉框调节该值使实际速度值与输出的速度值接近。
(三) 单位与反转
- 在单位下拉框中可以更换不同单位,分为"毫米、厘米、米" ,将动捕暂停→打开数据广播,在单位下拉框中选择要更换的单位→开启VRPN→点击播放。更换单位后,Ros2中打印的"Position" 数据的单位也会实时改变,可搭配VRPN的三种类型使用;
- 在"反转"中勾选上"X、Y、Z",表示将VRPN三种类型的位置数据的正负号反转,若勾选前在Ros2中"Position" 的数据为正,勾选后则会变为负。勾选后会将Ros中的"Position"的X、Y、Z坐标数据反转;
- "qx、qy、qz"表示方向旋转数据的反转,勾选后会将Ros2中的"orientation"的X、Y、Z坐标数据反转。
(四) 偏移
- 在"偏移"中可以设置变量数据的"X、Y、Z"坐标偏移(如图29),将软件暂停播放→打开数据广播→在"偏移" 值输入框中修改X、Y、Z的坐标偏移→开启VRPN→点击播放。修改好坐标偏移的值后,在Ros2中会将修改的值加到"Position"的X、Y、Z坐标值上。