(二)mocap_nokov
https://wiki.ros.org/mocap_nokov
一、源码编译安装mocap_nokov
- 依次运行以下命令,编译安装mocap_nokov。
mkdir -p ~/catkin_mocap/src</code>
cd ~/catkin_mocap/src/
git clone https://github.com/NOKOV-MOCAP/mocap_nokov.git
- 安装依赖,使用catkin_make编译。
cd ~/catkin_mocap/
rosdep install --from-paths src -y --ignore-src
catkin_make
.png)
二、配置环境
- 使用以下命令配置环境并在此终端下加载环境。
source ~/catkin_mocap/devel/setup.bash
echo 'source ~/catkin_mocap/devel/setup.bash' >> ~/.bashrc

加载环境
三、启用SDK
- 在动捕软件数据广播中,选择主机上与机载电脑同网段的地址。将模式选为组播,骨骼坐标选为全局,启用SDK。

SDK
四、配置mocap.yaml文件
- 使用以下命令修改mocap.yaml文件。
vim ~/catkin_mocap/src/mocap_nokov/config/mocap.yaml

mocap.yaml
- 在”rigid_bodies“字段中,添加要跟踪的刚体所需的主题。以rmtt_1刚体为例,在动捕软件中打开资产,找到该刚体的资产编号“0”,添加配置如下。server_address与在数据广播中选择的地址一致,为192.168.2.160。
rigid_bodies:
'0':
pose: rmtt_1/pose
pose2d: rmtt_1/ground_pose
odom: rmtt_1/Odom
tf: tf
child_frame_id: rmtt_1/base_link
parent_frame_id: world
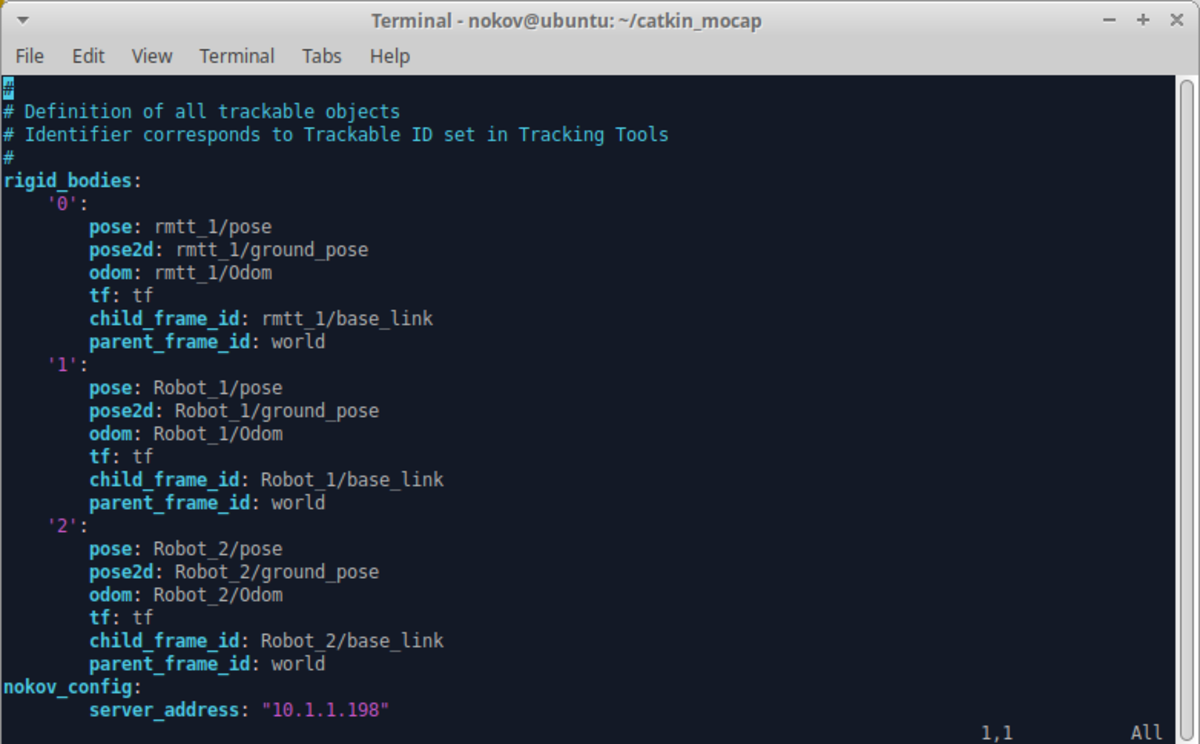
rigid_bodies字段
五、启动mocap_nokov
- 使用以下命令启动mocap_nokov。
roslaunch mocap_nokov mocap.launch
.png)
运行mocap_nokov节点
- 另启一个终端打印话题。
rostopic list
.png)
话题列表