(三)mocap4ros2_nokov
ROS2版本:Rolling,Ubuntu 版本:20.04
一、创建工作空间
mkdir -p ~/mocap4r2_ws/src && cd ~/mocap4r2_ws/src
二、拉取mocap4ros2_nokov源码
sudo apt install git
git clone https://github.com/NOKOV-MOCAP/mocap4ros2_nokov.git
三、安装相关依赖
sudo apt install ros-rolling-ament-cmake-clang-format
cd ~/mocap4r2_ws
rosdep install --from-paths src --ignore-src -r -y
sudo apt install -y python3-vcstool
cd ~/mocap4r2_ws/src
vcs import < mocap4ros2_nokov/dependency_repos.repos
四、编译工作空间
cd ~/mocap4r2_ws && colcon build --symlink-install
五、配置环境
source ~/mocap4r2_ws/install/setup.bash
echo 'source ~/mocap4r2_ws/install/setup.bash' >> ~/.bashrc

六、启用SDK
- 在动捕软件数据广播中,选择主机上与机载电脑同网段的地址。将模式选为组播,骨骼坐标选为全局,启用SDK。
.png)
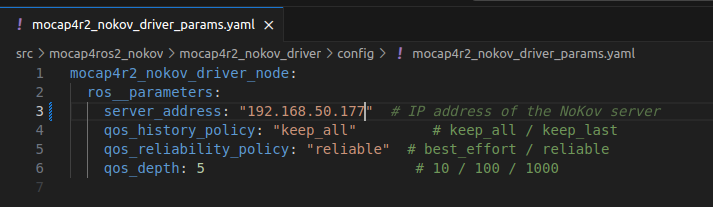
七、配置mocap4r2_nokov_driver_params.yaml文件
- 该配置文件在~/mocap4r2_ws/src/mocap4ros2_nokov/mocap4r2_nokov_driver/config目录下。在该文件中,server_address与在数据广播中选择的地址一致,为192.168.50.177;qos_history_policy为历史策略,keep_last 仅存储最后N条消息(N由队列深度决定),keep_all 存储所有消息,直到内存耗尽;qos_reliability_policy为可靠性策略,reliable 确保消息传递,但可能会增加延迟,best_effort 尽力发送消息,可能会丢失消息,但延迟较低;qos_depth为队列深度,历史策略=“keep_1ast”时有效,推荐值:实时控制(1-10)、传感器数据(10-100)、大容量数据(100+)。
八、启动mocap4ros2_nokov
- 使用以下命令启动mocap4ros2_nokov。
ros2 launch mocap4r2_nokov_driver mocap4r2_nokov_driver_launch.py
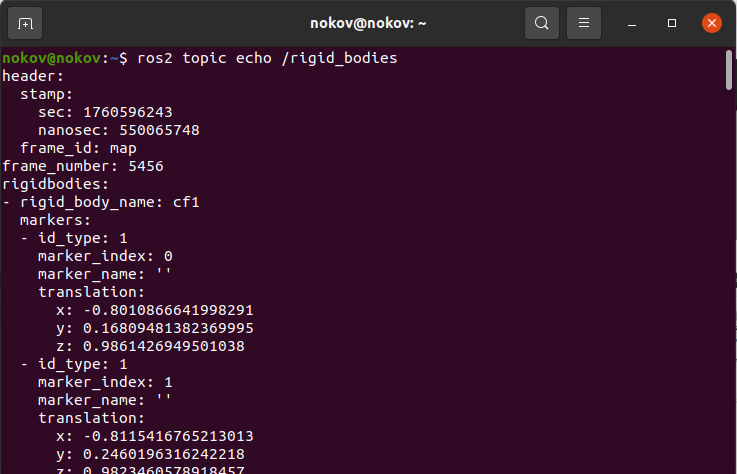
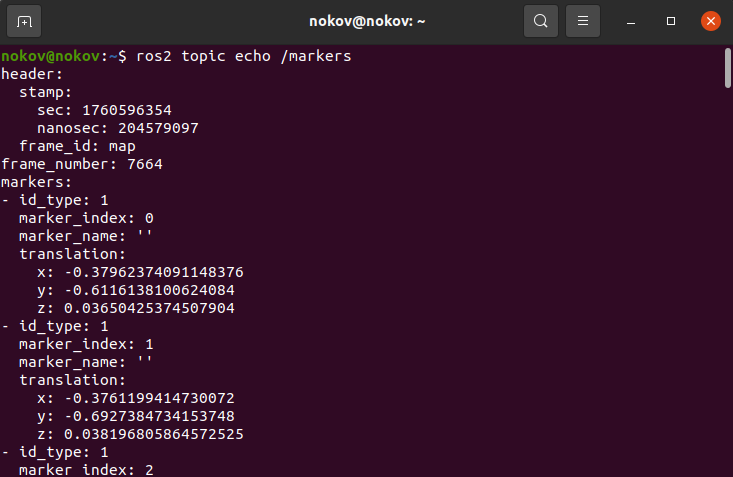
- 另启一个终端,查看刚体和未命名标记点位置数据。
ros2 topic echo /rigid_bodies
ros2 topic echo /markers
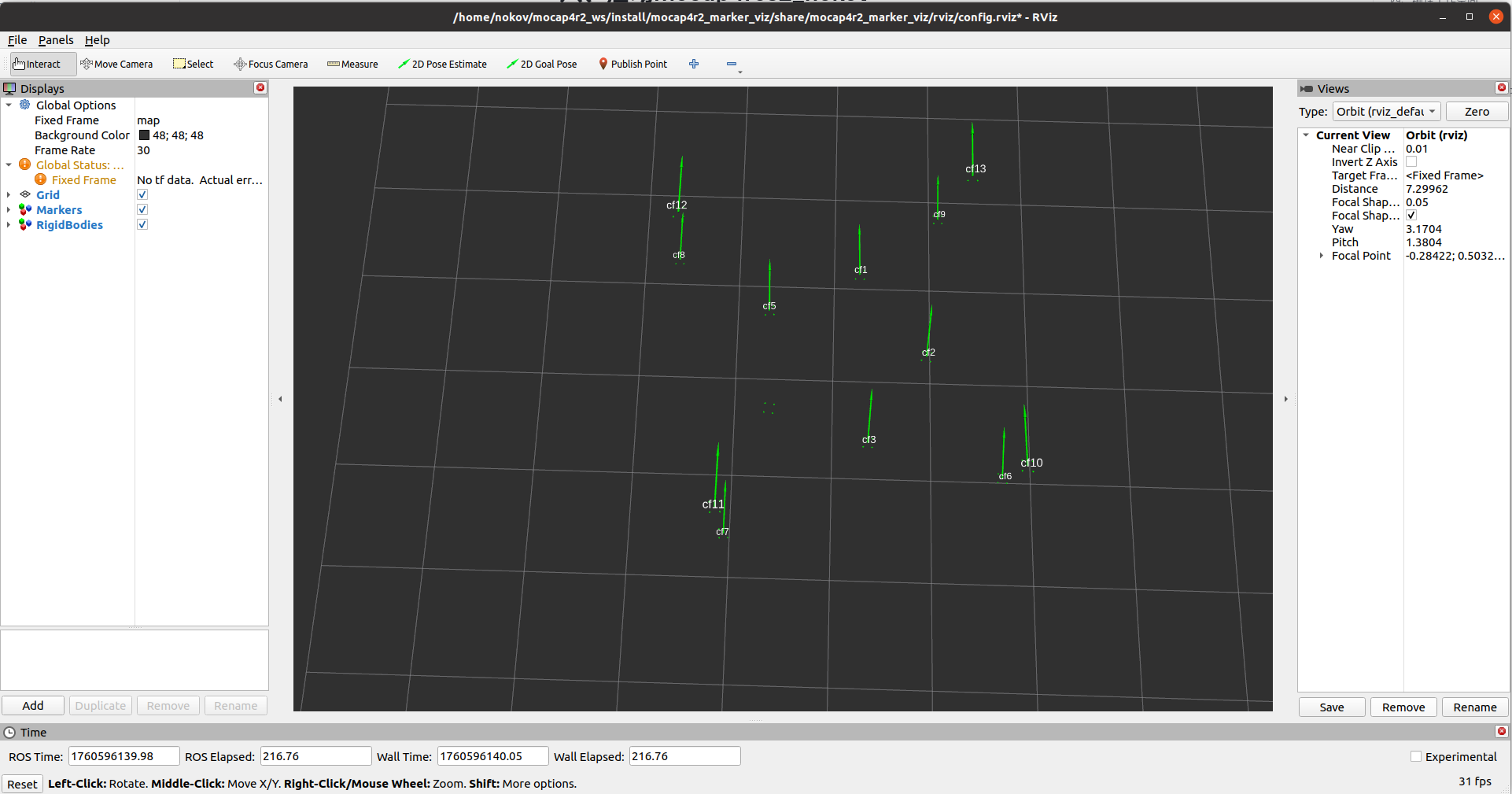
- 再启一个终端,使用以下命令将marker点显示在rviz上。
ros2 launch mocap4r2_marker_viz mocap4r2_marker_viz.launch.py mocap4r2_system:=nokov